Bonjour ,
Je ne pense pas que l’écume à l’intérieur du V de sillage soit généré par un process navire quelconque de leurres.
oui on injecte des bulles sous la coque ;
- pour diminuer la résistance de frottement
https://newatlas.com/mitsubishi-air-lubrication-system/21196/
( encore qu’ici sait pas dire s’il existe une application industrielle
- pour ( masquage du bruit rayonné) , on le fait sur les frégates ou destroyer ,ET cela suppose d'avoir une génération d'air comprimé significative , sur un PA ( bcq bcq bcq plus )
https://military-history.fandom.com/wiki/Prairie-Masker
Le « moutonnage » d’écume comme évoqué, semble être généré par l’intersection de la vague d’accompagnement avec l’état de mer multi-crètes que l’on devine en amont donc au spectre de houle. Spectre de houle qui signe différemment selon vent et type de mer/océan ( ouvert/fermé …etc
https://wikiwaves.org/Ocean-Wave_Spectra
Ceci dit en témoignent les quelques liens qui suivent , le sillage est un sujet très sensible qui de mémoire concentrait ( concentre ) beaucoup d’attention coté navires militaires. On sait que le sillage résulte de nombreux facteurs , dessin de la carène , de la voute/stern , des hélices ( puissance dans le disque propulsif , design , et immersion ) de la vitesse , du vent donc de l’état de mer ....etc .
«
Signature du sillage http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.129.7107&rep=rep1&type=pdf
trad page 136
La gestion du sillage est devenue importante parce qu’il peut maintenant être détecté par radar et parce que certaines torpilles modernes utilisent des capteurs de repérage de sillage. Lorsque le navire se déplace dans l'eau, il laissera un sillage. La signature de sillage générée contient différents types de perturbations de vitesse, de fluctuations de pression et de température, de bulles, d'ondes de surface et internes. Pour gérer cette signature, il est important que la coque, la propulsion, les appendices de coque et le gouvernail soient pris en compte ainsi que la vitesse, qui est une question tactique. Les appendices de coque jouent un rôle actif dans la propagation du champ de sillage, mais des simulations ont montré que les tourbillons les plus forts sont générés au niveau de la quille et du sillage de l'hélice. Lorsqu'ils interagissent les uns avec les autres, ils dominent le champ de flux de sillage en raison de la différence de distribution des énergies. Le courant d'hélice contribue à une énergie cinétique turbulente. Les tests ayant montré que l'énergie cinétique moyenne est la même pour une coque propulsée et non propulsée, l'augmentation de l'énergie cinétique turbulente représente un pourcentage plus élevé d'énergie dans l'écoulement. Les vagues de surface, entre autres composants dans le sillage, contribuent également à la signature RCS puisque le sillage arrière en forme de V est formé derrière le navire. Wake devrait donc être abordé pour une variété de considérations de signature. La signature de sillage est un problème tactique, car une vitesse inférieure réduit le sillage. C'est aussi un problème tactique puisque les torpilles modernes utilisent le sillage pour détecter le navire. Une torpille entrante dans le sillage peut également être difficile à détecter car la turbulence dans le sillage génère également du bruit.
Détection de sillage par Synthetic Aperture Radar (SAR)
https://www.sarusersmanual.com/ManualPDF/NOAASARManual_CH12_pg277-304.pdf
Trad page 284
« La trace laissée dans l'eau par un navire en mouvement, le sillage, est un indice important dans la détection des navires. Les structures de sillage se divisent en quatre catégories:
(1) les sillages turbulents s'étendant directement derrière le navire,
(2) le sillage Kelvin formé par les ondes de gravité de surface à l'échelle du décamètre générées par le passage du navire et se propageant vers l'extérieur à partir de la trajectoire du navire,
(3 ) sillages en V étroit visibles à travers la diffusion de Bragg à partir de courtes ondes centimétriques générées par des processus hydrodynamiques le long de la coque du navire, et
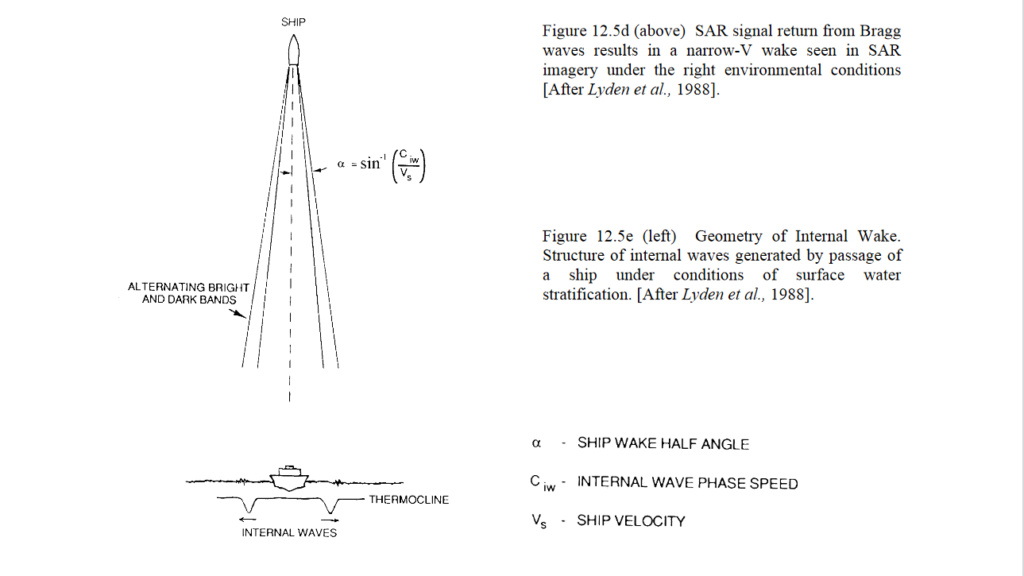
(4) sillages d'ondes internes générés dans des conditions de stratification peu profonde [Lyden et al., 1988; Shemdin, 1990].
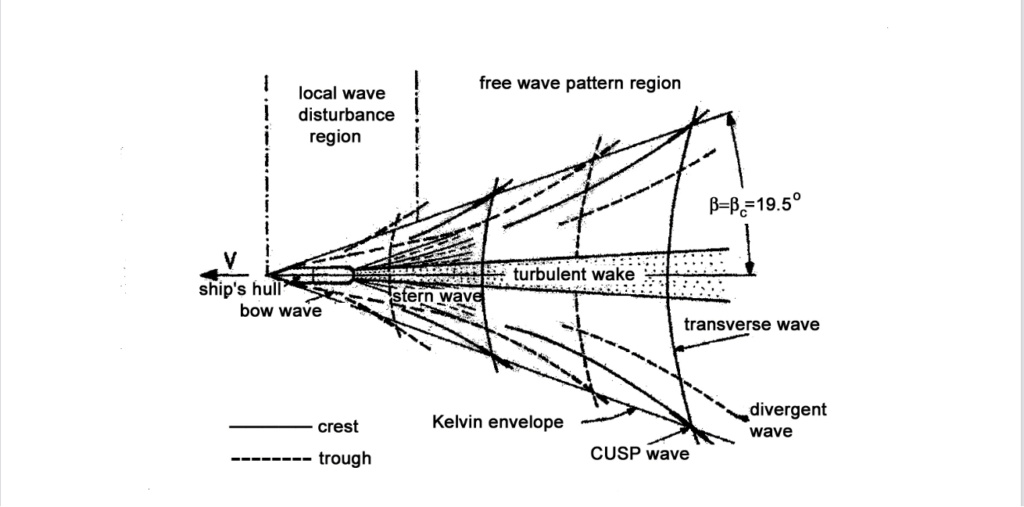
La figure 12.5 illustre la géométrie de ces différentes catégories de sillage. Chaque catégorie sera discutée ci-dessous en termes de processus physiques, de caractéristiques d'image SAR et de limites dans les systèmes SAR actuels.
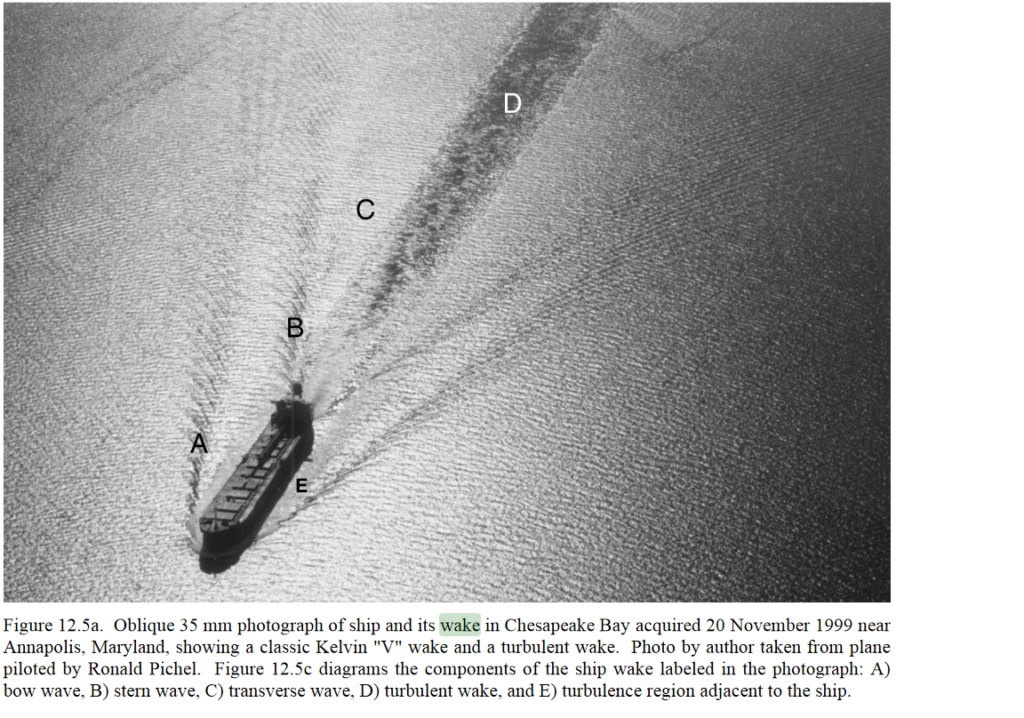

 Sillages turbulents
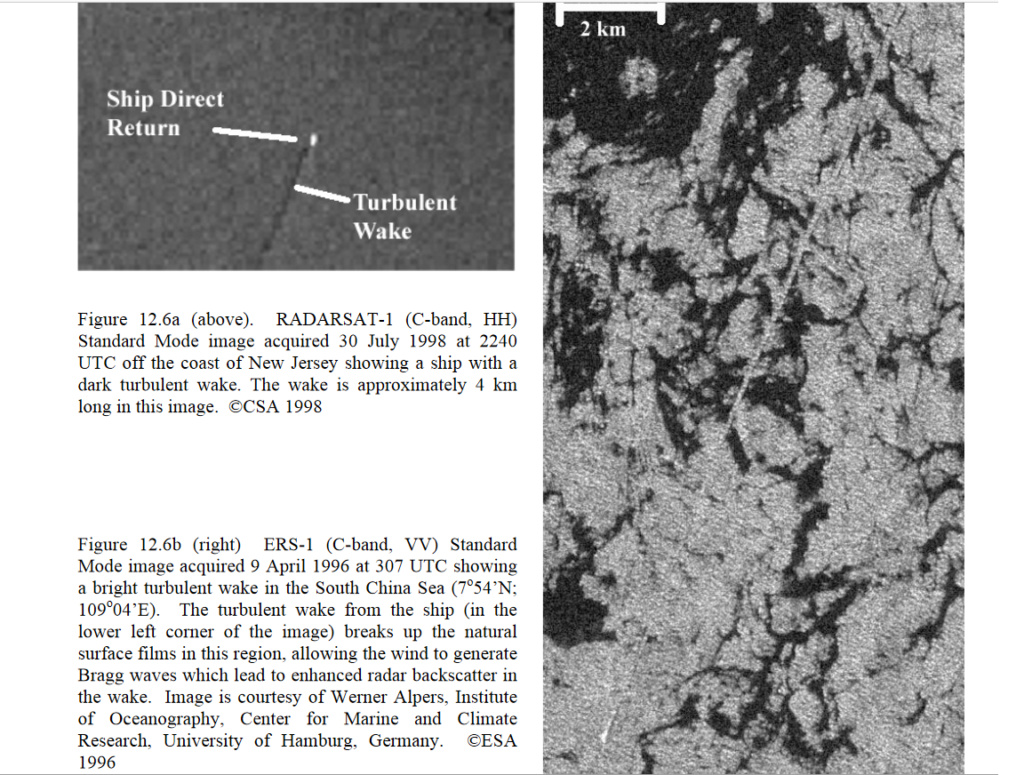
Sillages turbulents Turbulence formée par les vagues déferlantes, l'eau perturbée par la coque du navire et l'action des hélices du navire, toutes perturbent puis dérangent amortir les vagues à petite échelle directement derrière un navire qui passe. Immédiatement derrière le navire se trouve une région d'eau mousseuse et turbulente suivie d'une région beaucoup plus longue d'eau douce [Peltzer, et al., 1987]. C'est ce qu'on appelle le sillage turbulent (voir Figure 12.5b). Des panaches de bulles ascendants apportent des matériaux tensioactifs de la colonne d'eau et les concentrent à la surface, améliorant la suppression des vagues à petite échelle. L'amortissement des petites vagues dans le sillage turbulent est le résultat d'une augmentation de la viscosité, d'une diminution de la température et des changements de tension superficielle et d'élasticité de la peau de surface de l'océan [Peltzer et al., 1992]. Après le retour radar direct du navire lui-même , la signature de navire la plus courante dans les images SAR est le sillage turbulent. Ce type de sillage apparaît dans les images sous la forme d'une ligne sombre partant à proximité du navire et s'étirant sur quelques kilomètres derrière; il peut parfois y avoir une ligne brillante sur un ou les deux bords du sillage [Lyden et al., 1988]. Dans une mer agitée par le vent, le sillage turbulent sera plus doux que son environnement, réfléchissant moins d'énergie vers le radar et, par conséquent, apparaissant sombre sur l'image (voir Figure 12.6a). Dans des conditions de vent faible, le sillage peut être légèrement plus rugueux que son environnement et peut donc avoir un retour petit, mais mesurable, et apparaître légèrement plus lumineux que son environnement. De même, lorsque le navire navigue dans une région avec d'abondantes nappes naturelles , le sillage turbulent peut briser ces nappes, permettant au vent de générer plus de vagues de Bragg, produisant une rétrodiffusion améliorée (voir Figure 12.6b). Au passage du navire, le mouvement de la coque dans l'eau génère des tourbillons dont les courants de surface concentrent les tensioactifs aux bords du sillage turbulent. Au fur et à mesure que la turbulence de sillage se dissipe, la seule trace restante du sillage est parfois ces bandes de surface qui apparaissent alors comme de «voies ferrées» sombres s'étendant sur plus de 20 km derrière le navire [Milgram, et al., 1993] (voir Figure 12.6c Il existe de nombreux facteurs qui affectent la probabilité générale de détecter les sillages des navires dans les images SAR, notamment la vitesse du navire, la forme de la coque, le vent, l'état de la mer et le système de propulsion du navire [Peltzer, et al., 1987]. Le sillage turbulent est la signature de sillage la plus persistante (ainsi que la plus courante) observée dans les images SAR. Eldhuset [1996] a constaté que sur 200 éléments de type sillage observés dans l'imagerie en bande L de SEASAT, 85% présentaient des sillages turbulents d'environ 2,5 km; et dans 180 images en bande ERS-1C, 80% des sillages étaient turbulents avec des longueurs allant de 2,7 à 3,3 km.
Le sillage Kelvin, décrit pour la première fois par Lord Kelvin en 1887 [Thompson, 1887], se compose d'ondes de gravité transversales et divergentes générées par un navire en mouvement, qui interfèrent pour former les ondes cuspides qui sont les structures de sillage Kelvin les plus souvent observées dans les images SAR satellitaires. Comme l'illustre la figure 12.5c, les ondes transversales, se propageant approximativement dans la direction du mouvement du navire (c'est-à-dire avec des crêtes approximativement perpendiculaires à la direction du navire), ont des directions de propagation dans la plage 0°≤φ ≤ 35°16 ', où φ est le angle entre la trajectoire du navire et la direction de propagation des ondes (mesurée à partir de la direction du mouvement vers l'avant du navire) Les ondes divergentes se propagent vers l'extérieur à des angles approchant des directions perpendiculaires à la direction de mouvement du navire, dans la plage angulaire 35°16 '≤φ ≤ 90° [Hennings et al., 1999]. Ces deux types d'ondes interfèrent pour former un motif en forme de V d'ondes cuspides à intervalles réguliers le long du sillage à des demi-angles (c.-à-d., La moitié de l'angle intérieur formé par le "V") β de + 19,5°, avec le navire approximativement au sommet du "V". Ce modèle en forme de V est appelé le coin de vague Kelvin [Lighthill, 1978]. Les ondes de cuspides se propagent approximativement à φ = 35° avec des crêtes alignées à φ = 55° et une longueur d'onde de 4 / 3πV2g-1, où V est la vitesse du navire et g est l'accélération de la gravité. Il faut cependant noter que ces angles et cette longueur d'onde peuvent changer pour les grands navires lents (lorsque la longueur du navire l est grande par rapport à V2 / g) ou pour les petits hors-bord (où l est petit par rapport à V2g-1). Pour les vaisseaux lents, les ondes de sillage dominantes ont une longueur d'onde de 2πV2g-1 et se propagent à un petit φ; pour les vedettes rapides, les vagues sont beaucoup plus courtes et se propagent à grand φ, proche de φ = 90° [Lighthill, 1978] .Bien que pas aussi souvent imagée que le sillage turbulent, le sillage Kelvin apparaît dans des images SAR à plus haute résolution, comme 30 m résolution Imagerie RADARSAT-1 et ERS-1/2 en mode standard. Dans l'imagerie ERS-1/2, le sillage Kelvin est visible dans environ 17% des détections de navires [Melsheimer et al., 1999]. Un ou les deux bras du sillage Kelvin peuvent être représentés sous forme de stries claires ou sombres (Figure 12.6d) lorsque les conditions de vent sont modérées (3 à 10 m s-1). Les ondes cuspides ont généralement la plus grande amplitude dans le Kelvin. sillage, et sont donc plus susceptibles d’être imagés par un SAR. Les ondes de cuspides sont généralement étalées en une ligne dans l'image SAR, à un demi-angle d'environ +19,5 degrés. En général, un seul des deux bras de réveil Kelvin est visible sur les images SAR. Lorsque les ondes cuspides se propagent vers ou loin de la direction de visée radar, le bras Kelvin est généralement brillant à cause d'une augmentation de la section transversale radar normalisée; mais lorsque la direction de propagation est perpendiculaire à la direction d'observation du radar, le bras Kelvin n'est normalement pas imagé ou peut être sombre à cause d'une réduction de la section transversale radar normalisée [Hennings et al., 1999]. La différence angulaire entre les directions de propagation des ondes cuspides pour les deux bras est telle que lorsque les ondes cuspides d'un bras se propagent généralement dans la même direction que l'angle de vue du radar, les ondes cuspides de l'autre bras se propagent généralement perpendiculairement au radar. regarder la direction. Ainsi, lorsqu'un bras est à la visibilité maximale dans l'image SAR, l'autre bras est à la visibilité minimale ou est sombre. Il existe certaines combinaisons de cap / angle de vue radar où la rétrodiffusion des deux bras est relativement égale; cependant, en général, il y aura une disparité de visibilité.
La probabilité de détecter le sillage Kelvin augmente avec la vitesse du vent décroissante, mais est presque indépendante de la direction du vent. Il y a très peu de variation dans la probabilité de détection avec la fréquence radar, mais la probabilité devrait augmenter avec la diminution de l'angle d'incidence et devrait être plus élevée avec la polarisation HH qu'avec les systèmes SAR à polarisation VV [Hennings et al., 1999]. Les images de polarisation 1/2 VV ont tendance à présenter plus de sillages que les images de polarisation RADARSAT-1 HH en raison du plus grand signal aux bruits de ERS-1/2 [Wackerman et al., 2001]. Mais même dans les images ERS-1/2, les sillages ne sont pas observés dans 37% de toutes les cibles des navires [Vachon et al., 1997]. Les sillages en V se désintègrent beaucoup plus rapidement que les sillages turbulents et sont donc généralement beaucoup plus courts en imagerie SAR.
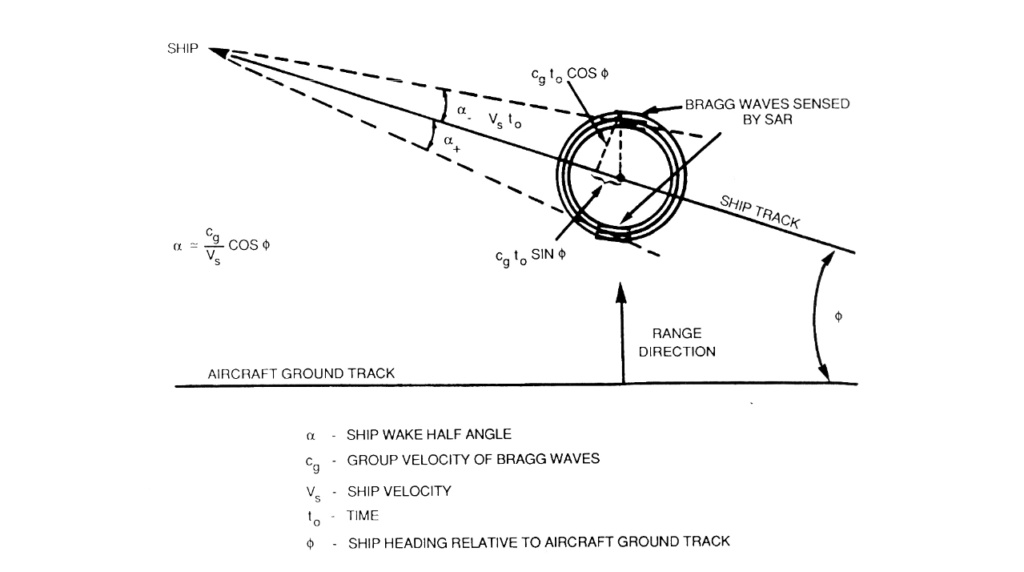
Sillage en V étroit Les sillages en V étroit observés parfois dans les images SAR résultent de la diffusion de Bragg résonnante (c'est-à-dire améliorée) des impulsions radar des ondes courtes à l'échelle centimétrique qui sont générées par la coque se déplaçant dans l'eau et qui se propagent vers l'extérieur dans toutes les directions (Figure 12. 5d). Uniquement visible à l'œil sous forme de très petites vagues, le motif en forme de V caractéristique de deux lignes lumineuses n'est visible que sur les images SAR. Les sillages en V étroit ont inclus des demi-angles dans la gamme de 2 à 3 degrés [Shemdin, 1990]. L'angle est déterminé par le rapport entre la vitesse de groupe des ondes de Bragg et la vitesse du navire [Shemdin, 1990] et le cap du navire par rapport à la trajectoire au sol de la plate-forme SAR [Lyden et al., 1988]. La figure 12.6e montre un sillage en V étroit. Les sillages en V étroit ne sont visibles dans les images SAR qu'à des vitesses de vent faibles (moins de 3 m s-1); c'est-à-dire dans les cas où la vitesse du vent est trop faible pour générer suffisamment de vagues de Bragg pour former une rétrodiffusion radar mesurable de l'océan environnant. Des sillages en V étroit ont été observés dans les eaux profondes et peu profondes quelle que soit la stratification [Shemdin, 1990].
Sillage à ondes internes Dans les cas d'eau de surface stratifiée avec une forte pycnocline peu profonde (c'est-à-dire une région de fort gradient vertical de densité), le déplacement vers le bas de l'eau de surface par le navire peut générer des vagues souterraines (c'est-à-dire internes). Il en résulte des sillage d'onde interne en forme de V avec des demi-angles, β = sin-1 (c / v) où c est la vitesse de phase de l'onde interne la plus externe et v est la vitesse du navire [Gasparovic, et al., 1989]. Les ondes internes générées par les navires se déplacent lentement, avec une vitesse de phase d'environ 0,1 à 1,0 m s-1. Le demi-angle diminue donc avec l'augmentation de la vitesse du navire. Le sillage se compose d'ondes internes se propageant à peu près perpendiculairement à la trajectoire du navire. Comme pour les autres types d'ondes internes (voir Ondes internes océaniques, chapitre 7), les variations de courant de surface associées à l'onde interne interagissent avec les petites ondes de Bragg de surface, ce qui entraîne des changements de rugosité de surface semblables à des ondes visibles [Lyden et al., 1988]. Voir la Figure 12.5. Le sillage peut être un V étroit ou avoir un demi-angle encore plus grand que le sillage Kelvin. L'angle peut changer le long de la trajectoire du navire car le V se rétrécit au fur et à mesure que la vitesse du navire augmente. Comme les ondes internes générées par le navire se déplacent lentement, il n'y a pas d'ondes internes transversales générées à moins que le navire ne se déplace très lentement, auquel cas le navire peut subir une traînée interne des vagues connue sous le nom d'effet d'eau morte [Watson et al., 1992]. f représente un sillage d'onde interne. Les sillages internes des vagues ne sont observés que dans les régions de stratification des eaux peu profondes. Ils sont observés dans des conditions de vent modéré (environ 3 à 10 m s-1). Ils sont plus facilement visibles dans l'imagerie en bande L que dans l'imagerie en bande X ou en bande C en raison de la persistance plus longue des ondes de Bragg en bande L [Lyden et al., 1988]. Les réveils d'ondes internes sont plus distincts si le capteur SAR regarde perpendiculairement à la trajectoire du navire. Les ondes internes (et en fait les vagues et les sillages océaniques en général) sont beaucoup plus apparentes dans les images SAR à haute résolution (par exemple, en mode standard) que dans les images à balayage SAR.
autre lien
http://www.steelnavy.com/WavePatterns.htm




























 pour cette étude fouillée.
pour cette étude fouillée.